Method
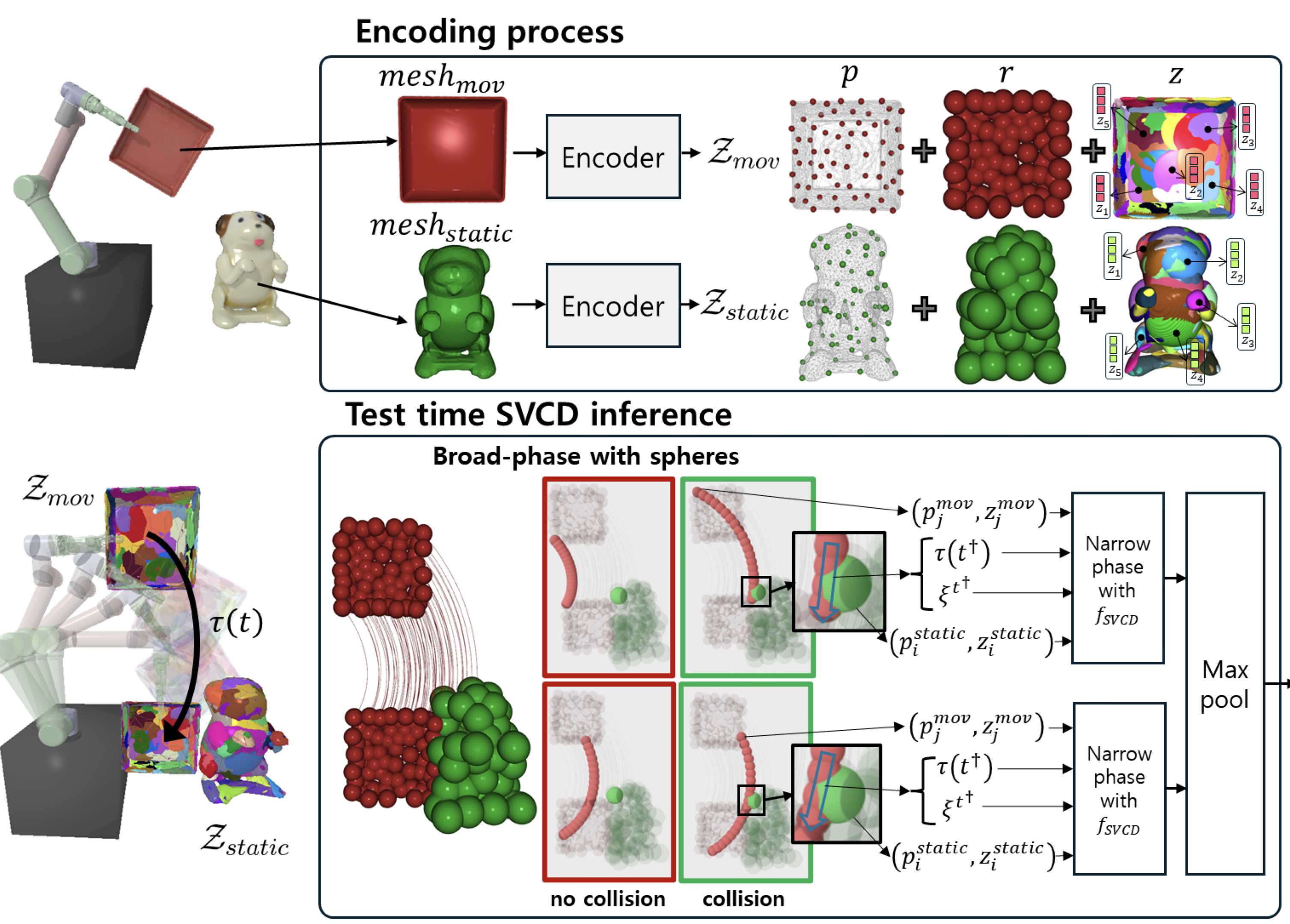
NeuralSVCD is a SVCD(Swept Volume Collision Detection) algorithm which uses a novel geometric representation designed to leverage shape locality and temporal locality, which has 24 times speed-up over sphere-based GPU methods (collision detector from cuRobo) and more than a 100 times speed-up over mesh-based GJK (collision detector from TrajOpt) —while simultaneously improving accuracy by ≈ 5~15 % even with the shapes unseen during. Our method consists of three stages: object encoding, broad phase, and narrow phase.